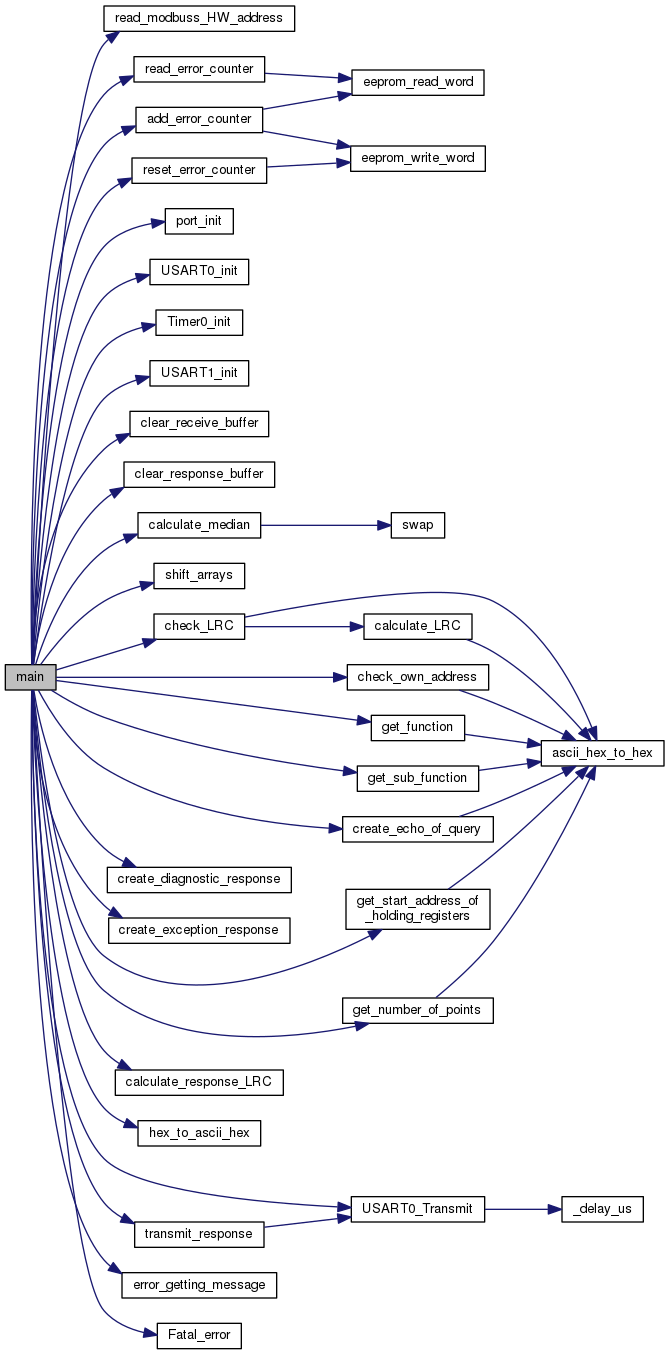
Main State Machine.
More...
#include <stdint.h>
#include <stdio.h>
#include "kosteus.h"
#include "sht11.h"
State controls to main program flow
initialize HW ports for input and output
- Todo:
- Configure counter so, that timeout is 1 second
- Todo:
- Change the counter to count every 100th message
- Todo:
- This case is just for testing. To be modified to Report Slave ID
2 is Place of datacount value in the ModBus Response Message
| unsigned int boot_counter =0 |
| unsigned int bus_comm_error_counter =0 |
| unsigned char datacount = 0 |
| unsigned char device_version[] = "$Revision: 248 $" |
- Todo:
- Too many global variables
| unsigned char error_condition |
| unsigned int exception_error_counter =0 |
| unsigned int first_start_indicator |
| unsigned char laskuri = 0 |
| unsigned char length_of_ascii_hex_response = 0 |
| unsigned char length_of_message = 0 |
| unsigned char length_of_response = 0 |
| int measurement_number =0 |
Totally received modbus frame
| unsigned char modbuss_address |
| volatile unsigned char nro_characters_received = 0 |
| volatile unsigned char nro_characters_to_be_sent |
| unsigned int number_of_points |
| unsigned char previouse_received_character |
| unsigned char query_type = 0 |
| unsigned long int receive_timeout |
| unsigned char received_character |
Response frame to be sended to master
| unsigned int start_address |
| unsigned int sub_function |
| unsigned char transmit_buffer_begin |
| unsigned char transmit_buffer_current_pos |

 1.8.11
1.8.11 
